Why is active suspension important to the EV market?
Do electric vehicles need active suspension?
The decision for the OEM is often not straight-forward. Typically, there are two primary considerations:
- Product positioning
- Product performance
Active suspension comes in different forms, with some premium vehicles adopting Fully Active Suspensions, although the most common form is the semi-active suspension or CDC (Continuous Damping Control). With a CDC system, the controller reads information about the road inputs and the motion of the body (the sprung mass) and wheels (the unsprung mass) and adapts the level of damping applied in each shock absorber to optimise vehicle dynamics performance.
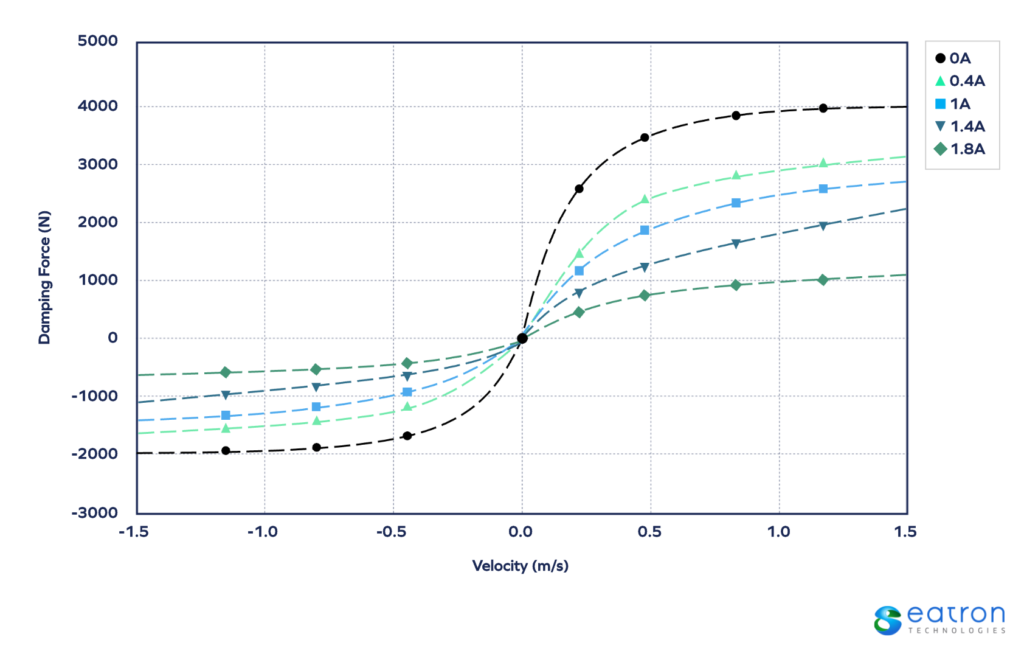
How much adaption is possible will depend on the hardware specification of the shock absorbers. The most common technology is electronically controlled single or twin valve shock absorbers which can adapt the damping force by +/- 50% in around 30ms. This choice of technology, along with the specification of sensors and control methodologies mean that not all CDC systems are equal. The capability of the chosen system in addressing the challenges is critical in forming the business case.

So, what are those challenges?
Product positioning
Many new and ambitious EV brands are targeting the premium market, where discerning customers expect a good balance between ride comfort and vehicle handling. Established OEMs in this space also offer CDC either as standard or as an option on their vehicles. The need for semi-active suspension here is about bringing a competitive product to the market. In theory, any well marketed CDC system can address these challenges. However, there is compelling technical justification too.
Product performance
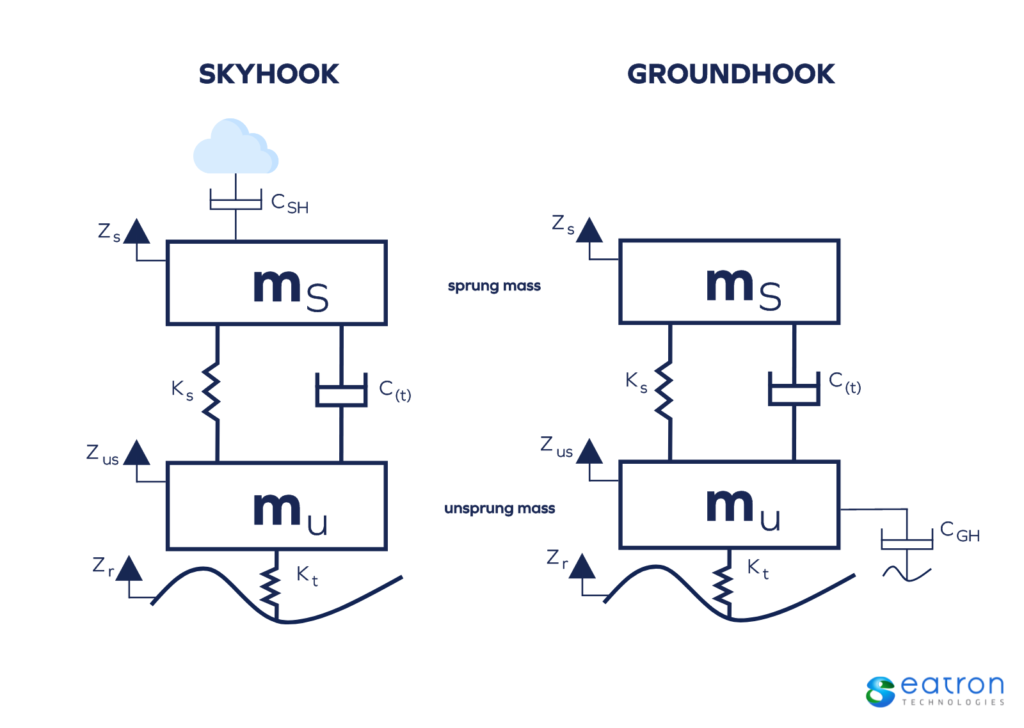
Achieving good comfort while delivering an engaging EV driving experience is a similar challenge in itself to the same goal on an ICE vehicle. The ideal ride comfort experience can be described by the “skyhook” control principle, where body accelerations are minimised to provide a magic carpet ride feeling. In contrast, the “groundhook” control principle better describes the goal for good road connection feel, where maintaining consistent vertical wheel force at each corner is critical. Eatron Technologies have chosen a hybrid skyhook:groundhook control approach which can be easily tuned by the OEM and can be adapted based on the driving situation to provide the optimum balance between comfort and handling.
But the goal becomes more difficult on an EV due to simple physics
Weight and inertia are key factors for vehicle dynamics performance. Typically, in today’s market EV models have 20-30% higher kerb weight than their ICE equivalents. Even in examples where the vehicle platform has specifically been developed as an EV architecture, the weight of battery packs, traction motors and their integration are still resulting in heavier vehicles. The positioning of these masses typically has a mixed effect on inertias.
These new masses and inertias create a greater separation between ride and handling performance. The resulting trend can be a decrease in ride frequency to maintain ride comfort, causing the need for higher roll stiffness to maintain roll gain. In dynamic situations, with more energy to control, higher levels of damping are required to maintain equivalent levels of body control to a lighter vehicle. This impacts negatively on ride comfort.
To compound this further, we should also consider the higher tractive forces generated by EV propulsion torque. The challenges of controlling wheel slip are no longer limited to high performance models or low friction scenarios. Even on entry-level EVs, the acceleration possible is amazing, but this means that maintaining consistent vertical force on the tyre contact patch is even more critical.
Insufficient damping and the unsprung mass can lack control, resulting in varying vertical force at the tyre contact patch. The corresponding variation in lateral and longitudinal tyre behaviour can undermine driver confidence as the vehicle feels less connected to the road. Under more demanding conditions this can ultimately result in a loss of grip.
This is where CDC is essential if the OEM is to achieve those target levels of ride comfort and vehicle handling. While it cannot compensate completely for excess mass, in most situations the CDC system can apply minimal levels of damping to maximise isolation of the sprung mass from the road inputs, while actively increasing damping levels when needed to control both the sprung and unsprung masses.
Further benefits of CDC
With OEMs looking to offer increased personalisation to the consumer, CDC can help here too. In the case of vehicle dynamics this personalisation can be in the form of selectable driver modes, making the vehicle more comfortable when carrying passengers, or feel more connected to the road when driving for fun. Along with adapting the response and feedback of driver controls, such as the steering and accelerator pedal, CDC can adapt the damping to create this more comfortable or connected character.
Where next for active suspension?
Beyond CDC systems, many vehicles are equipped with other forms of active suspension today. Air suspension offers ride height control and switchable spring rates while active roll control can adapt the vehicle roll gain and understeer gradient.
The fitment of more capable suspension actuators, such as those offered in Mercedes eABC and Audi pre-emptive active suspension systems, remains an expensive decision for the OEM. Before making that choice, the merging of software within domain controllers is increasing the benefits possible from a combination of existing systems. Choosing the optimum integration of actuators, sensors and control approach is critical to the business case.
Furthermore, with all new vehicles now equipped with ADAS cameras and cloud connectivity, the opportunity to preview data and use shared information offers great potential to improve the vehicle dynamics and personalisation experience in EVs even further.
Brian Smith Technical Leader of Motion Control Eatron Technologies






