
Shining a Spotlight on Laser Sources for Automotive Exterior LiDAR
As autonomous driving is gaining traction, LiDAR design engineers are facing many options to choose the right architecture for a given application. Indeed, LiDAR is a catch-all acronym that can cover a wide variety of requirements such as range (short, medium, long), resolution, acquisition rate, field of view, an spatial and depth resolution, which in turn will drive different requirements on the sensors, optical chain, electronics, and illumination sources to guarantee the correct detection of an obstacle and determine its distance.
LiDAR can be divided into two families that differ for the basic working principle: pulsed LiDAR, using direct detection, is able to recover the intensity of the received optical power; and coherent LiDAR, which instead launches frequency-modulated signals and, at the receiving side, can extract amplitude, phase, and frequency information from the optical carrier. In this article, we will review semiconductor lasers for incoherent LiDAR systems (flash or scanned). More specifically, we will be considering two types of lasers: edge-emitting lasers (EELs) and vertical-cavity surface-emitting lasers (VCSELs) (Table 1). We will not cover hereafter fiber lasers (FLs) or frequency-modulated continuous-wave (FMCW) lasers used for coherent systems.
Different architectures will impose the use of specific lasers, which we will review in the following sections.
Table 1: Typical semiconductor laser sources for external automotive LiDAR and their characteristics.
| EEL | VCSEL | |
| Illustration | ||
| Power density | Scales with emitter width and bar width | <1 kW/mm2 |
| Brightness | ~1 MW/mm2-steradian | ~10 kW/mm2-steradian |
| Beam divergence | ~6° x 50° (elliptical) | ~25° x 25° (circular) |
| Beam shaping | Relatively complex | Relatively simple |
| Wavelength range | 800-1100 nm (GaAs-based) 1300-1600 nm (InP-based) | 800-1100 nm (GaAs-based) |
| Standard wavelength | 905 nm | 940 nm |
| Spectral shift vs. T | ≈0.3 nm/°C | ≈0.06 nm/°C |
| Reliability | Redundancy for arrays of EELs | Redundancy built in with array configuration |
| Cost | Scanning systems/high power | Flash systems/medium power |
| LiDAR detection range | Medium to long | Short to medium |
EELS and VCSELs – Where Does the Light Come From?
In edge-emitting lasers (EELs), the light is emitted parallel to the mounting interface. The emitted beam is elliptical with a wide vertical divergence, which requires placing optics close to the facet to collimate the beam in the vertical direction (fast-axis collimation, i.e., collimation of the beam in the axis where beam divergence is the greatest). These complicated assembly steps contribute to increasing the cost of EEL integration into a system. The ratio of emitting area to chip area (fill factor) can be very high (as high as 80%). In addition, gain regions can be stacked on top of each other (multi-junction technology, Figures 1 and 3), which means that a typical single-emitter in short pulse (≈50 ns) can emit 100-200 W of peak power. By having a series of emitters connected in parallel (a laser bar, Figure 2), even higher peak power (>1 kW) can be obtained. Furthermore, the narrow vertical-emission area means that the brightness is relatively high (see Table 1 and Figure 8), which is an advantage for scanning LiDAR systems as we will describe in further detail below.


| Figure 1: Picture of a triple-junction EEL produced by II-VI, with 600 µm cavity length used for LiDAR applications. | Figure 2: CAD rendering of a bar of EELs (4 emitters), which can be used for addressable illumination and/or to increase peak power. | Figure 3: Picture of a 325-emitter multi-junction VCSEL array produced by II-VI. |
VCSELs emit light perpendicularly to the surface on which the laser is mounted. As a result, these type of lasers are low-cost, easy to integrate with optics, and compatible with surface-mount technology (SMT). Another advantage of VCSELs is the low emission wavelength shift with temperature (0.06 nm/°C) compared with EELs (~0.3 nm/°C). This means that for an operating temperature ranging from -40°C to 120°C, the wavelength of an EEL will shift by ~48 nm, while for a VCSEL, the shift will only be about 10 nm. The smaller the wavelength range caused by temperature variations, allows the use of narrower bandpass filters, which minimizes the amount of ambient (parasitic) sunlight and therefore improves the signal-to-noise ratio of the system.
Due to the lower fill factor compared with EELs, the power density of VCSELs is smaller than EELs. However, recently the power density of VCSELs has been increased by multi-junction technology, where several gain regions are stacked vertically in the laser cavity. This allows higher output power from the same chip area. Using such technology, VCSELs — when operated in pulse widths of a few nanoseconds and at low duty cycles (<0.1%) — can reach power densities as high as 1 kW/mm2, which makes them attractive sources for short- and mid-range LiDAR systems. An example of such an operation is shown in Figure 4 for a VCSEL array emitting more than 250 W peak power with a 3 ns pulse width and a 0.01% duty cycle.

Figure 4: Peak output power emitted from a VCSEL array (325 emitters) mounted on an evaluation board operated at 25°C, 3 ns pulse width, and 0.01% duty cycle.
While both EELs and VCSELs can be fabricated on GaAs at wavelengths in the range of 800-1100 nm, traditionally automotive EELs have been available at 905 nm while high-power VCSELs are produced in large volume at 940 nm for mobile phone applications.
LiDAR System Architectures and Impact on Illumination
LiDAR systems tend to be based on three main categories: flash or scanning, both of which are incoherent systems; and FMCW, which is a coherent system. In the following, we will only cover the incoherent systems; coherent solutions will be discussed in another article.
Flash LiDAR – Peak Power is Key
In a flash LiDAR system, the laser light is illuminating the entire scene at once (Figure 5), which means that the emitting power is shared with all the pixels on the sensor. As a consequence, the peak power needs to be high to get enough power on each pixel even for low-reflectance targets and with parasitic sunlight. Due to limitations on maximum power achievable from the lasers, flash LiDAR systems tend to be used in short- to mid-range applications (~10-100 m) whose peak power requirement is in the range of 50 W to 1 kW, depending on the exact range, resolution, and field of illumination of the system. In order touse less electrical power and to design less costly illumination systems, is to reduce the required peak power. One way to to achieve this is to concentrate the illumination on smaller areas (e.g., dots) instead of uniformly illuminating the entire scene. This is sometimes referred to as spot time-of-flight (spot-TOF).

Figure 5: Schematic of a flash LiDAR system.
An important criterion in selecting a light source for a LiDAR system is the cost of the light source. In Figure 6, the rough price comparison between EELs and VCSELs is reported. The plot shows that, in general, VCSELs will be more cost-efficient than EELs for short- to mid-range systems. It is worth noting that the cost in the graph only represents the laser costs (without integration costs). Furthermore, packages based on EELs will be more expensive, due to the more complex mechanical and optical assembly.

Scanning LiDAR – Illumination Where You Need It
In a scanning LiDAR system, at any given time the emitted light is illuminating a fraction of the scene/sensor, and the illumination source scans the scene over time (Figure 7). This requires a mechanism for scanning, such as microelectromechanical systems (MEMS) mirrors, rotating polygons, optical phased arrays, or liquid-crystal solid-state scanning systems.
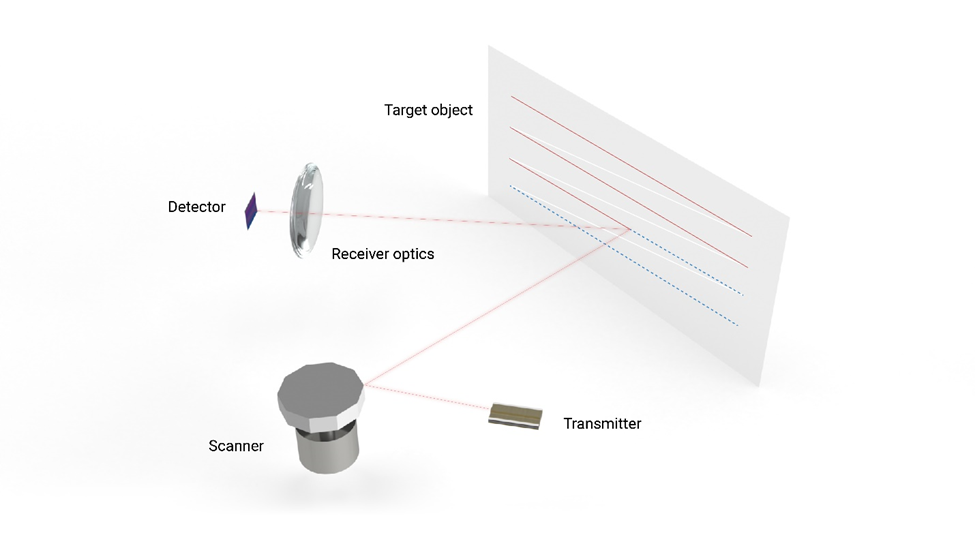
As the beam only illuminates a few pixels at a time, the optical power is concentrated on the relevant area. Hence, scanning systems require less peak power than flash systems and therefore can use smaller laser sources. On the other hand, such systems require high-brightness sources to illuminate the mirror with a relatively small cross section while keeping a low divergence for the long-range illumination. Figure 8 shows that the brightness of triple-junction EELs is greater than that of a multi-junction VCSEL by about two orders of magnitude. This makes EELs the source of choice for scanning LiDAR systems, thanks to their higher brightness compared with VCSELs.
It is worth mentioning, though, that if the power density of VCSELs gets increased further, the gap between EELs and VCSELs would close. Furthermore, the advantages of other VCSEL properties (such as the reduced wavelength shift with temperature) in some cases might outweigh the lower brightness.

Figure 8: Brightness versus chip size for triple-junction EELs versus multi-junction VCSELs operated in short pulse (≈5 ns), low duty cycle (<0.1%). Bubble size represents the peak output power.
The Choice of Color – Choosing the Right Wavelength
Several factors contribute to the illumination wavelength choice, such as eye safety, weather robustness, and sensor compatibility.
Eye Safety – An Absolute Must
One of the most critical considerations relates to eye safety, or remaining safely below the maximum laser exposure levels to human eyes. Wavelengths longer than 1400 nm tend to be safer, as the light is partially absorbed before reaching the retina and is not focused by the cornea, which means that the power density reaching the retina is low. In contrast, wavelengths in the short-infrared range (800-1400 nm) are focused by the cornea on the fovea of the retina (Figure 9). In contrast to visible wavelengths, which are perceptible to the human eye, IR wavelengths elicit no blinking reflex that would limit the exposure time. Overall, the maximum permissible exposure limit (MPE) at 1550 nm is about two orders of magnitude greater than at the shorter wavelengths. This means that a system using 1550 nm for illumination can emit higher power (approximately 100x) than 800-1100 nm systems and still remain eye-safe. This in turn means that the sensing distance can be increased for a longer reach.

Cost Consideration – Illumination Sources and Sensor Availability
One of the several barriers to wide adoption of LiDAR systems is still the elevated cost of the systems currently available. Laser sources and detectors represent some important contributors to the overall cost. In order to keep the cost as low as possible, it is beneficial to use the already existing high-volume manufacturing of Si-based detectors. Likewise, GaAs-based lasers have an emission wavelength matched to the Si sensitivity and benefit from a large manufacturing infrastructure, with some companies producing 6-inch-diameter wafers.
As Figure 10 shows, (below)operation at 940 nm is highly desirable because it is less susceptible to bright sunlight, such as in outdoor applications. This is driving recent standardization of 940 nm in mobile applications, as well as sensitivity improvement of Si-based sensors at 940 nm, which is outside of the typical range of 800-900 nm for these sensors.
In contrast, InP-based lasers emitting in the range of 1300-1600 nm are still manufactured at a comparatively small scale (on 2-inch or 3-inch wafers) and therefore at relatively higher cost. In addition, sensors sensitive in this wavelength range can either be based on SiGe or InP technology. SeGe technology suffers from high dark current and is not yet mature. The cost of InP technology is typically too high for 2D sensor arrays.
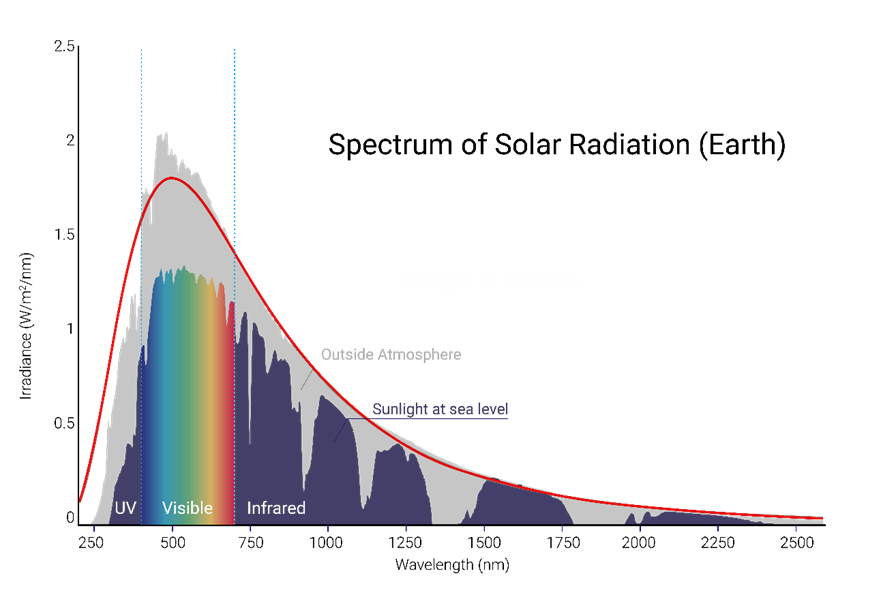
Sunlight – The Parasitic Illumination
LiDAR systems rely on a known illumination signal bouncing back from a target and detected on a sensor. The sun, however, is emitting light in the same wavelength range and mixes in with the signal, degrading the signal-to-noise ratio of the system. Since the parasitic sunlight signal intensity depends on wavelength, matching the sun’s blackbody radiation altered by a series of absorption lines in the Earth’s atmosphere (Figure 10), with both 940 nm and 1550 nm operating wavelengths are attractive choices for illumination, to minimize interference from sunlight. Note that the water absorption in the atmosphere is responsible for the low amount of sunlight at 940 nm and 1550 nm, which means, as a corollary, that 940 nm and 1550 nm are more absorbed than shorter wavelengths in adverse weather conditions.
Conclusion – Each to Its Own
In this article, we reviewed several tradeoffs and considerations that would guide a system designer in the choice of the most appropriate laser for LiDAR systems. In summary, there is not a single answer for all applications. In general, EELs are well-suited as sources for scanning systems due to their high brightness. but suffer from some disadvantages compared with VCSELs, such as cost, beam shaping, and wavelength shift with temperature.
Inversely, VCSELs are attractive for short- to mid-range flash LiDAR systems, because of their low cost, low wavelength shift with temperature and simpler optics.
However, lasers, sensors, and scanning systems are constantly evolving. For example, as multi-junction VCSEL technology continues to be improved by VCSEL suppliers, brightness will increase and that might close the gap to EELs.
Furthermore, we have limited our review to semiconductor lasers for incoherent systems, but there are other illumination sources to be considered, such as diode-pumped solid-state lasers (DPSSs), erbium-doped fiber amplifiers (EDFAs), and frequency-modulated continuous wave (FMCW) lasers.
LiDAR is on track to revolutionize the automotive sector, and laser development will continue shaping future systems.
Author: Julien Boucart, Director Product Management, II-VI
Dr. Julien Boucart obtained his PhD in 1997 at Alcatel in France, working on long wavelength VCSELs for telecommunication application. He continued working in this field in various companies and joined II-VI in 2006 where he worked in several functions as R&D, marketing, product engineering on various semiconductor lasers type in the industrial, data communications and consumer electronics applications. Since 2017 he is leading the product management of VCSELs for consumer and automotive applications with an emphasis on lasers for depth sensing.





