
Recent megatrends for electrification of propulsion systems, automation of driving tasks, interconnectivity and mobility buying instead of owning automobiles are solutions brought about by the automotive industry in answer to environmental social and political demands as they make use of technological advances like digitalization and internet of things.
New passenger car attributes like zero emissions, driving range, driving comfort, perceived safety & reliability (driven by a computer), operational safety and no accidents have become of the uppermost importance. In the vehicle development stages these factors influence vehicle systems boundaries so much so that system interfaces between powertrain, chassis, body, E/E and interiors are blurred.
However, this also leverages potential to improve overall energy efficiency, safety and comfort.
The following article will describe these potentials by linking electrification, assisted (ADAS) and automated driving (AD). Predictive controls at the high-end, electrified propulsion in BEV’s and a technological approach to evaluate and optimize human perception criteria at assisted or automated driving levels will be discussed.

- Perceived Safety & Comfort – ADAS Performance Criteria Definition and Validation
With more than 20 years of research and development of objective criteria for vehicle driving attributes, and automated measurement technology, AVL has been continuously focused on ride comfort, handling, and L1 to L3 ADAS/AD performance criteria, for evaluation of perceived safety and comfort.
Two key development targets are addressed with this technology: firstly, the driving scenario detection with automated data processing, contributes to development speed and secondly, objective and human centered criteria, provides clear quality targets including comprehensive tools for evaluation. Hence, this approach optimizes efficient multiple system calibration and AD motion control parameters. Particularly in cases of calibration of perceived safety and comfort, the parameters are distributed over the powertrain, chassis and longitudinal plus lateral AD controls. Objective, measurable criteria are mandatory to reduce optimization effort and reach time efficiently performance targets.
The methodological approach is shown in Figure 2. A set of sensors provide physical input data or object data, which are currently categorized into 22 different scenarios of L1 to L3 features. Each scenario consists of many different sub-criteria which are automatically assessed. The assessments are correlating to expert’s ratings and are provided immediately after the driven AD scenario on road without any user interaction. The integrated tool features are environment perception, scenario classification, criteria assessment, visualization, data logging and automated reporting.

The objective evaluation technology is applied in ADAS/AD performance benchmark programs, target/KPI definitions, and features verification tests within SiL/MiL environment, calibration, quality gate validation on road and fleet testing e.g. extracting critical real-world scenario.
- Human Perception Aspects on different levels
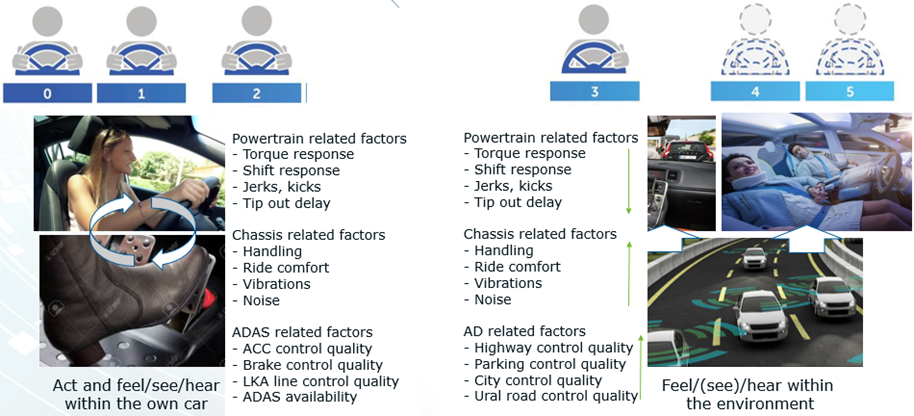
At Level 0 (ref. to SAE J3016) ADAS features like lane departure warning (LDW), the human driver is performing the driving tasks and the ADAS control has no actuator interrelation. Many L0 features are safety features and therefore related to accident prevention performance as described in NCAP definitions.
At higher levels, the AD motion control takes over more or less dynamic driving tasks with the effect, that human perception becomes significantly important. Hence, depending on the AD level, the overall AD performance is impacted by the reactions of the chassis and the powertrain system and also environmental disturbances like crosswind, road friction or a change in traffic.
The driver recognizes the driving situation and evaluates the situation as a whole. In addition, the human perception is differentiating mainly between comfort and safety, even if it is related to one and the same driving scenario. An example with focus on AD motion control quality is shown in the following figure, where a Highway Pilot L3 system is approaching a low speed vehicle in front and traffic conditions do not allow a lane change. A concrete example for perception criteria with time safety and comfort relevance, is shown as “barycenter”, which mainly means absorbance of 50% kinetic energy or even minimum acceleration behavior.

At level 4 and above the driver is fully out of the loop from participation on environment perception, decision making and dynamic driving tasks – even in case of severe vehicle fails. The human perception is fully focused on the vehicle base attributes like ride comfort, cabin comfort, handling, driveability performance and fuel/energy consumption, but now new criteria regarding Kinetosis must be taken into account.
For many reasons at higher AD levels, the virtual verification and evaluation of human perception by use of simulated environments (SiL, MiL), becomes significantly important. Since this kind of evaluation requires assessment of base vehicle dynamics along with AD control parameters, the dynamic vehicle model takes second stage giving the AD environment simulation the highest relevance. The following figure shows the AVL approach, which consider a strong dynamic vehicle simulation but also the integrated automated evaluation tool for powertrain, chassis and AD system related perception criteria.

- Energy Efficiency – Smart and Predictive Controls
Using this approach energy management, regardless of propulsion type is based on information using 3 separate inputs.
- The instantaneous feedback of status information and measurements within the car.
- Far field information like topology and routing trajectory.
- Near field information (within the next minute) where ADAS & AD information comes into the game.
- How can an electrified powertrain benefit from AD and Connectivity?
- Evaluating the potential requires an understanding of the cross impact of the different technologies. a vehicle equipped with ADAS/AD and connectivity, the number of functions and sensors increases respectively, and with increasing automatization (SAE Level 0 to Level 5) so too the electric energy demand increases. This energy demand impacts the fuel economy of the vehicle and powertrain system.

The potential increased energy efficiency due to ADAS/AD is based on the utilization of the extensive information of the environment due to the various sensors and connectivity (V2X). For instance, the adaptive cruise control (ACC) that modifies the vehicle speed according to traffic flow, can be upgraded to be energy efficient as standard. The predictive ACC feature (P-ACC) considers topology and routing information to achieve an energy efficient velocity trajectory.
Further energy efficiency potential of the ACC feature is the so-called cooperative ACC (C-ACC) that uses the connectivity of vehicles amongst each other (V2V), or as shown in the next example using infrastructure information (V2I). An example of such a feature is the AVL traffic light assist (TLA). This feature aims to use the green wave in the most energy efficient way including the regenerative energy. Simulation results using maximum information availability as a basis, show a potential of up to 30% increase in fuel economy. Using the status quo of available information reduces the time horizon of prediction which leads to increases in the fuel economy potential by 4-7% in a city environment.
Batteries – potentials when using the information domain
With the unpredictability of the future and management of energy efficiency and demand, building a battery for electric vehicles in the future could be considered a major challenge.
The bulk of vehicles will still utilize a single speed single e-machine powertrain. The simplistic the propulsion system, the more challenging is the high dependency on environmental conditions and non-vehicle infrastructure. For this reason, the main focus will be on functions that increase the range even with a single motor drive with only one gear ratio. A good example is the predictive powertrain management model of AVL utilizing topology and traffic flow information, offering a range gain of about 3 to 5 %.
Another key attribute of BEVs is to ensure the right charging behavior for the driver. Connectivity leads to understanding the charging behavior and infrastructure at the arriving point. Deciding for DC-fast charging due to driver charging preferences and further route information, the predictive thermal powertrain management system needs to modify the operating strategy accordingly, to precondition the system.
The rational therefore is the reduction of charging time resulting in increased current within the cell. The high current in the cell reduces the charging performance quite fast due to the columbic losses producing heat. Whereas at low charging power of 11 or 22kW AC no essential preconditioning is required, at high DC charging power of 150 – 350kW substantial preconditioning is required. Preconditioning of e.g. the passenger compartment due to reduced cooling performance while fast charging, and utilizing the battery system for optimized power acceptance leads to reduce range. The information of DAS, Connectivity and routing slows that fast-dropping display and reduces the range impact by 5-7% due to optimized temperature settings for long distance travelling using a predictive trajectory.
Development of thermal potential Topics from this area lead back to some well-known topics of thermal storage, like latency memory. The weight and space requirements were prohibitive attributes disqualifying this type of energy storage.

A battery shows the best behavior between 10 – 35°C for both lifetime and power capability. The average ambient temperature shows a wide spread, annual and daily that leads to variation of the thermal energy stored in the battery. Accessing that energy requires a modified thermal circuit on the physical domain resulting in cost and weight. The minimum delta temperature limits the accessible thermal energy.
This energy can be used for tasks like preconditioning the cabin (defrost), defrosting the chiller in the winter, or increasing the COP of a heat pump e.g. in winter conditions. This can mean an additional heater is not necessary. The saving of about 4kg, slightly over compensates the additional thermal components for accessing the energy. Cost wise the balance is positive.
Using the battery as thermal storage enables 5-12% less range penalty at short distance travel. Correlated to a 60kWh battery additional range of 8km can be achieved (Figure 7).
This solution relaxes the energy demand while driving but requires more energy from the grid while parked. The energy demand can be reduced significantly by considering thermal insulation of the battery.
The information about the medium time horizon, considering the time constants of the thermal energy are more in the range of several minutes to hours than seconds to optimize the thermal setpoint of the battery. Examples of this kind of information are expected weather conditions, future destination, when the vehicle is used again, and what charging infrastructure is expected. Based on this a predicted trajectory of energy demand can be generated and the model based operating strategy is optimized with regards to the available data.
- Outlook
Autonomous driving is one of the largest growing areas within automotive electronics and AVL are well placed to take the lead on human perception and efficiency oriented performance optimization, from system design, tailored controls development, testing to validation says Erich Ramschak (Business Development ADAS & Autonomous Driving)
Authors: Erich Ramschak & Gerald Teuschl, AVL List GmbH





