
Achieving better EV brake feel through quantitative testing
Every driver knows the importance of the vehicle brake pedal. Not only is it the interface with the primary safety feature, it also gives the driver a sense of confidence, control and a feeling of security, and when it comes to fun, it can make or break the driving experience.
One of the most significant inventions in vehicle braking was the introduction of the vacuum booster, which led to great improvements in braking performance and feeling. Now with the introduction of electrification, braking systems are undergoing another evolutionary change with regenerative braking. The braking system is now used to capture kinetic energy, utilising the electric motor’s capability as a generator to push energy back into the battery, maximising the vehicle’s range.
Blended braking systems
Regenerative braking alone can’t support all braking requirements. There are limits to the level of deceleration it can provide, typically < 3m/s2, and it requires the back emf from the motor to provide the braking torque, which drops off as the speed approaches 0 km/h. Therefore, the foundation brake needs to make up the shortfall. This is achieved by blending the braking torque from the regenerative and the foundation braking systems, which together provide the overall deceleration.
This sounds simple, but in fact there are many variables that effect the level of braking. Some of these, like State of Charge (SoC) are easy to measure, others, like friction μ level, are more difficult, due to the variability of the friction μ level. This makes the blending of the two braking systems very challenging. Commonly in EVs the driver can experience varying levels of deceleration for the same braking demand, making the brake feel unpredictable at best or at worst unsafe, which can lead to costly recalls.
To blend the two systems, the brake pedal is decoupled from the hydraulic system, with the brake controller modulating the foundation brake as required to achieve a combined deceleration. This can be achieved by using a brake-by-wire system, where the pedal characteristic, stroke and load are provided by a pedal simulator element and the braking demand by a stroke sensor, which is used within the brake controller to produce the required deceleration. The controller calculates the proportion of braking to be provided by each system. Most brake applications will require both regenerative and foundation braking.
The development and testing of these systems are now even more complex, and producing optimal brake feeling is challenging. The “expert driver” methods of measuring and developing brake feeling has limitations and objective testing can’t consistently provide the level of precision needed to improve these systems.
Brake feel measurement solution
EV braking systems are significantly more complex, with the battery/regenerative brake on one side, and the friction brake on the other. The level of braking available from the regenerative side can be relatively easily measured, however the available braking from the friction brake is much more variable. So, to develop these systems a repeatable and accurate method of applying the brake is required, therefore, allowing the engineer to understand the exact influence of each system on the brake.
The AB Dynamics Brake Robot was specifically designed to provide accurate and repeatable applications of the brake pedal. The control parameter can be pedal stroke, pedal load or to a level of deceleration or mixed, with apply rates of up to 1500 mm/s. The resulting measurements are captured within a controller, with sample rates up to 16kHz. This allows the engineer to get a quantifiable measure of the brake feeling of a vehicle across various conditions and vehicle speeds. For an EV, because the Brake Robot can provide the same input, the effects of differing States of Charge (SoC) can be assessed, and the effectiveness of the blended brake can be evaluated accurately under different driving situations.

EV brake feel testing
- pedal stroke,
- load,
- and deceleration.
In addition to these, for an EV, the State of Charge and the front- and rear-line pressures are also needed to understand the brake blending.
The Brake Robot system consists of a brake actuator, pedal load cell, installation frame and control unit. The control unit handles the control side of the robot and all data acquisition. The other parameters like State of Charge (SoC) can be captured using the controller’s CAN Bus input. A PC running the Robot Controller Software provides the user interface and tools for running standard tests, graphing and data export. (Figure 1)
To examine the brake feeling of an EV, a suitable pedal input scenario would be stopping at traffic lights, which involves applying the brake to a specific position and holding the brake constant, until the vehicle comes to rest. To replicate this using the brake robot system, a stroke controlled trapezoidal input would be suitable. This can be defined within the Robot Controller software as a BR Trapezoidal Step. (Figure 2).

From this type of stop, the contribution of the regenerative and the foundation brake can be separated out. (Figure 3).

The contribution of the foundation brake can be assessed if the test is repeated with the vehicle in neutral, disconnecting the regenerative part of the brake. Note that the Brake Robot applies the same input as before, allowing a direct comparison to be made between the two tests. (Figure 4)
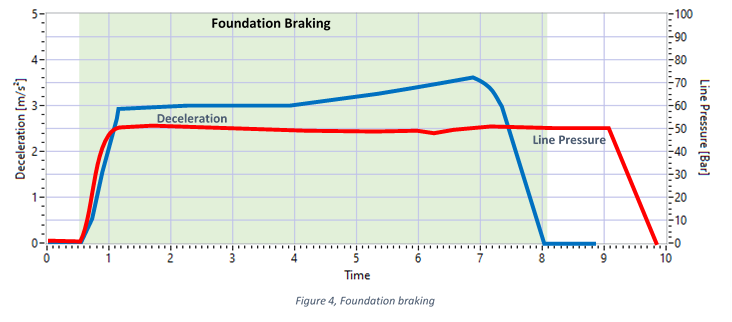
In analysing the data, for a 3 m/s2 stop, the initial deceleration is fully provided by the regenerative brake, and this is maintained until the vehicle speed has dropped to 10 km/h, at which point the brake controller starts to increase the line pressure to compensate for the fall in braking torque as the vehicle decelerates. However, the deceleration data shows a drop in braking at this point. (Figure 3). When tested in neutral, the foundation brake friction characteristic can be evaluated. In this case, the friction level increases between 30 km/h until 10 km/h, then drops., (Figure,4). This drop in the friction level compounds with the regenerative braking torque drop.
To show how this might affect the driver’s perception of the brake feeling, a deceleration test could be conducted. This time the control parameter is deceleration, set to provide a constant deceleration of 3 m/s2. This will measure the pedal input that the driver needs to apply to maintain a constant level of braking, which would be required to avoid overshooting the traffic lights, (Figure 5)

The analysis of the data shows that to keep the level of deceleration constant at 3 m/s2 , the driver must apply an additional 10 mm of pedal stroke.
This will reduce the driver’s level of confidence in the braking system and might even lead to more low speed collisions if the driver fails to compensate for the reduction in braking. Market analysis by the Insurance Institute for Highway Safety shows that hybrid vehicle collisions are substantially worse than average. This maybe due to this deceleration drop near the end of the stop.
The data from the robot would allow for modifications of the control software, by showing the limitation of the current blend.
This is one example of where the Braking Robot can assist in vehicle development.
Additional testing would include:
- Brake feeling: Using a trapezoidal step, the brake system characteristics can be assessed, allowing the feeling to be quantified.
- Braking stability: Using a mode change, where the Robot control is changed from position to deceleration, braking induced instability can be evaluated. This is an especially important test where the regeneration is provided via the rear axle.
- Braking performance: Using a trapezoidal step, brake fade performance can be measured. This is of particular importance for brake-by-wire systems, where the pedal feeling is unaffected by fade.
- NVH: Using the mode change, accurate levels of deceleration can be used to evaluate brake noise and vibration. Manging noise levels is especially important as EV cabins are generally quieter.
The results provided by Robot measurement can be used to improve the toughness of the braking system, allowing the engineer to visualise the system’s performance, then adjust the system where necessary, whether it be a software or a friction material change, and then assess the effects of the change.
Conclusion
Since the vacuum booster was introduced in the 1950s, drivers have become familiar with the level of control, confidence and performance that that system provides. Electrification is the new norm and with it, the customer expects the same levels of control, confidence, and performance as before.
The Brake Robots enables the brake engineer to evaluate these systems to levels of precision that were not possible in the past. The information provided by the Braking Robot enables the development of brake feeling and performance to a level expected by the customer, and ensures that the system’s toughness is competitive, leading to better customer satisfaction and reduced warranty issues.
Allan Johnstone, Principal Applications Engineer, AB Dynamics





